Energy Storage Science and Technology ›› 2022, Vol. 11 ›› Issue (11): 3613-3622.doi: 10.19799/j.cnki.2095-4239.2022.0298
• Energy Storage Test: Methods and Evaluation • Previous Articles Next Articles
Zhicong LIU( ), Yanhui ZHANG()
), Yanhui ZHANG()
Received:2022-06-01
Revised:2022-06-16
Online:2022-11-05
Published:2022-11-09
Contact:
Yanhui ZHANG
E-mail:2015918310@qq.com;zhangyanhui33@qq.com
CLC Number:
Zhicong LIU, Yanhui ZHANG. Parameter identification and state of charge estimation of lithium-ion batteries[J]. Energy Storage Science and Technology, 2022, 11(11): 3613-3622.
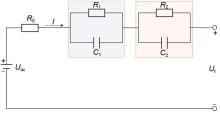
Fig. 1
2RC equivalent circuit model"
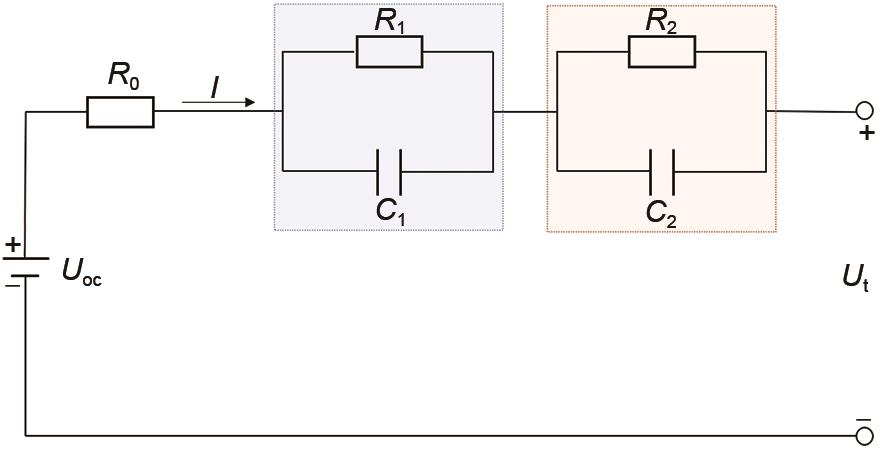
Table 1
battery specification"
| 电池参数 | 规格 |
|---|---|
| 类型 | LiNMC |
| 额定容量/Ah | 2 |
| 标称电压/V | 3.7 |
| 充电截止电压/V | 4.2 |
| 放电截止电压/V | 2.5 |
Fig. 2
Constant current pulse discharge current voltage change"
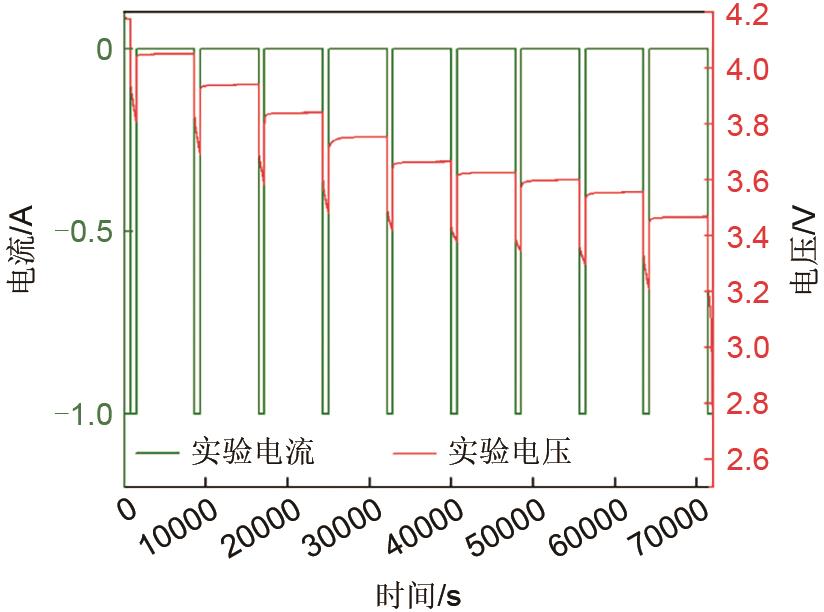
Fig. 3
Partial enlargement of pulse discharge"
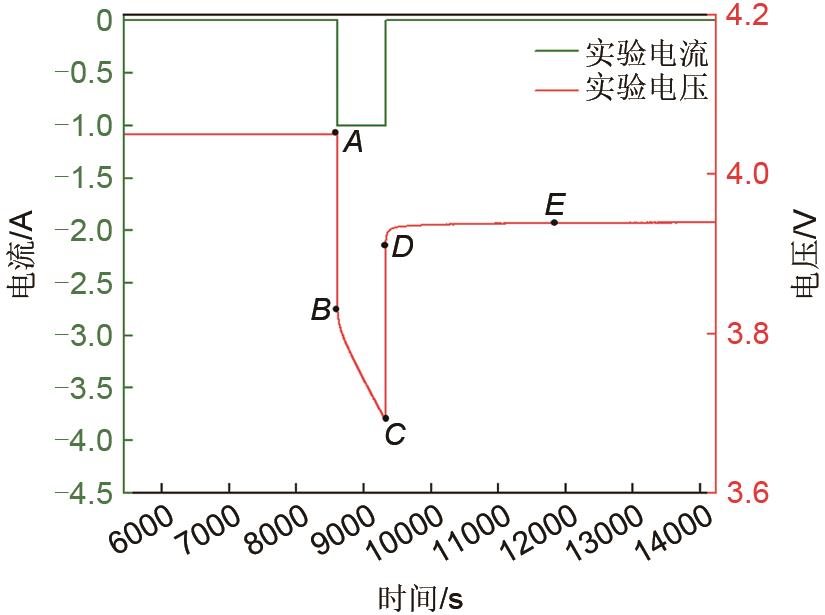
Table 2
Uoc under different SOC"
| SOC | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
|---|---|---|---|---|---|---|---|---|---|---|
| Uoc/V | 3.46 | 3.55 | 3.59 | 3.62 | 3.66 | 3.75 | 3.84 | 3.94 | 4.05 | 4.17 |
Fig. 4
Fit the graph of SOC-OCV"
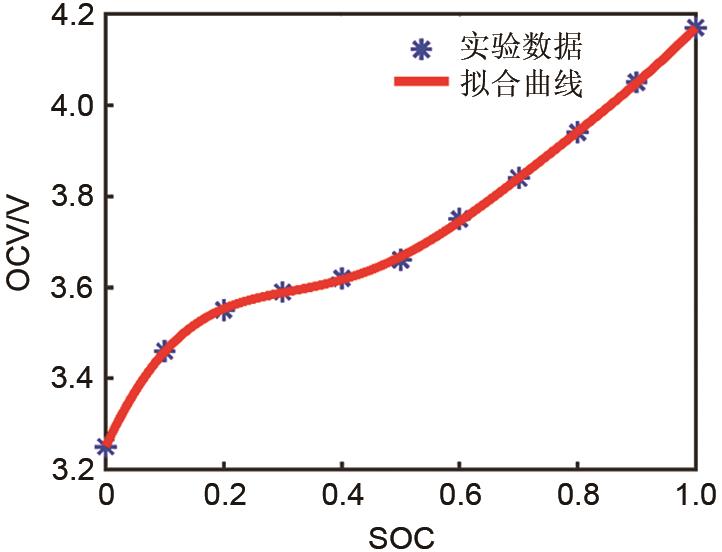
Table 3
Offline parameter identification results"
| SOC | R0/Ω | R1/Ω | R2/Ω | C1/F | C2/F |
|---|---|---|---|---|---|
| 0.1 | 0.2282 | 0.0142 | 0.0084 | 3720.6 | 16308 |
| 0.2 | 0.2272 | 0.0147 | 0.0158 | 2224.4 | 18186 |
| 0.3 | 0.2228 | 0.0159 | 0.0131 | 2345.5 | 23497 |
| 0.4 | 0.2219 | 0.0130 | 0.0083 | 2261.9 | 36469 |
| 0.5 | 0.2324 | 0.0126 | 0.0083 | 2037.0 | 42751 |
| 0.6 | 0.2283 | 0.0133 | 0.0059 | 1592.8 | 54825 |
| 0.7 | 0.2261 | 0.0163 | 0.0061 | 1422.1 | 27437 |
| 0.8 | 0.2210 | 0.0178 | 0.0065 | 1286.2 | 46328 |
| 0.9 | 0.2230 | 0.0132 | 0.0056 | 1599.9 | 57086 |
Fig. 5
Contrast diagram of experimental terminal voltage and simulation terminal voltage"
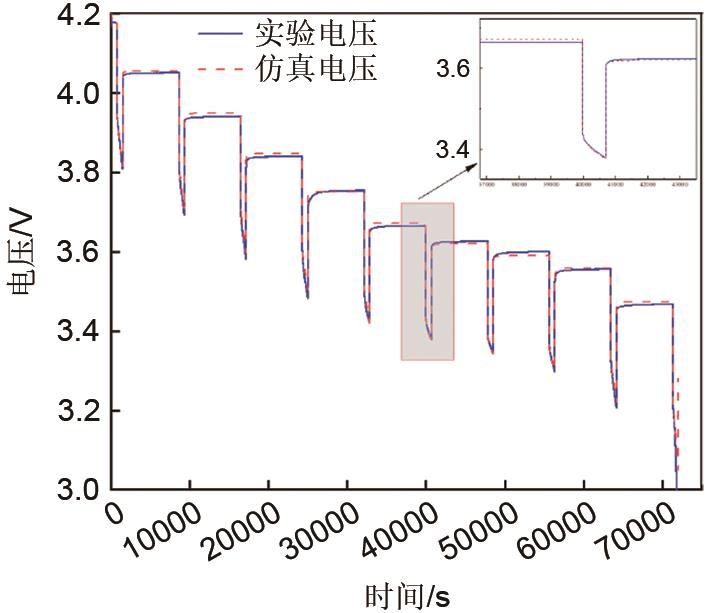
Fig. 6
Experimental terminal voltage and simulation terminal voltage error curve"
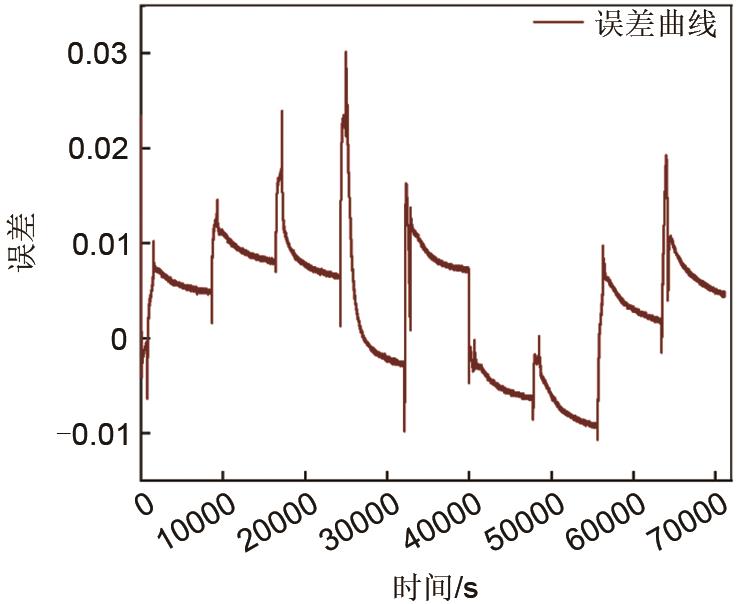
Fig. 7
R0 parameter identification results"
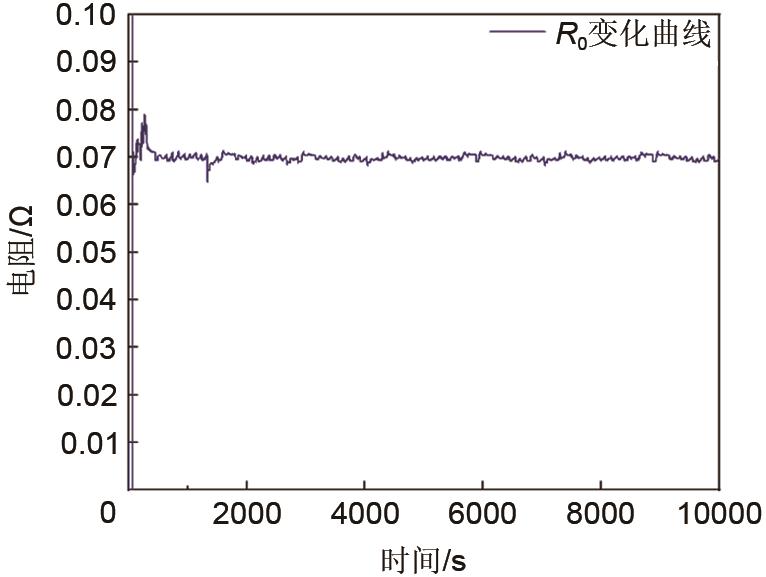
Fig. 8
R1 parameter identification results"
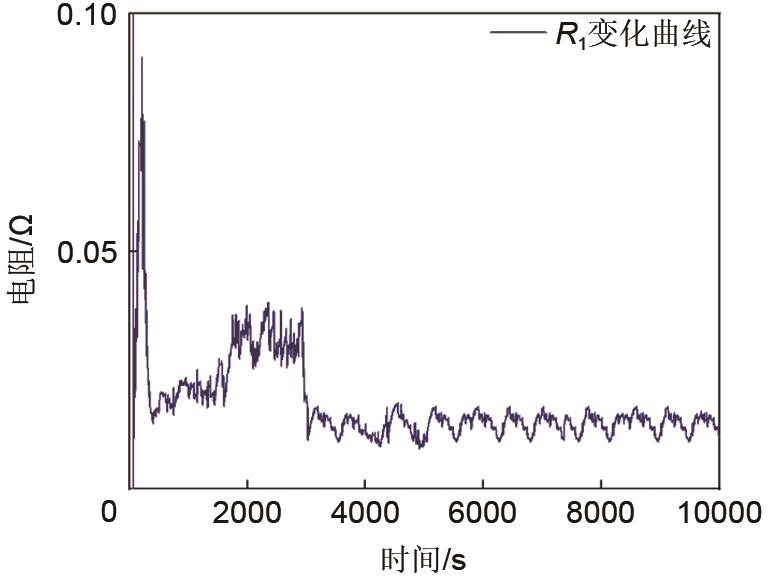
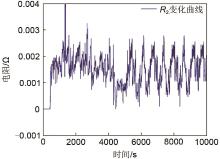
Fig. 9
R2 parameter identification results"
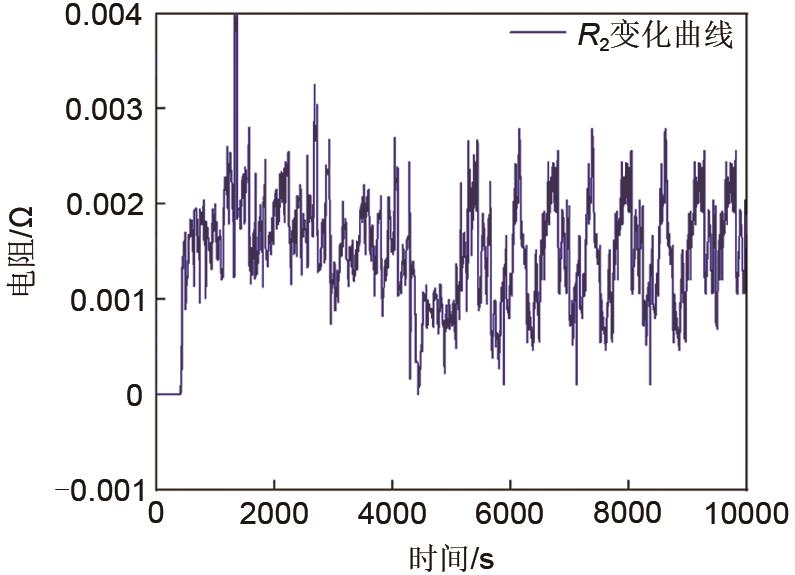
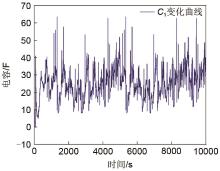
Fig. 10
C1 parameter identification results"
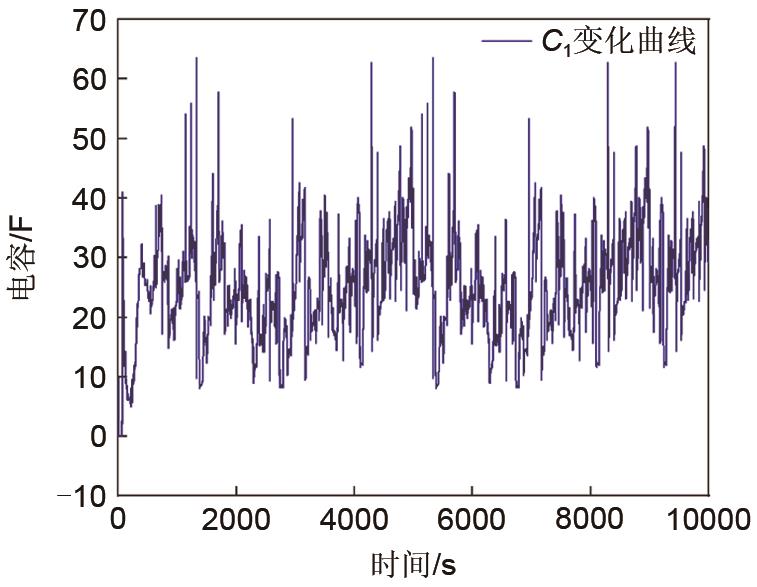
Fig. 11
C2 parameter identification results"
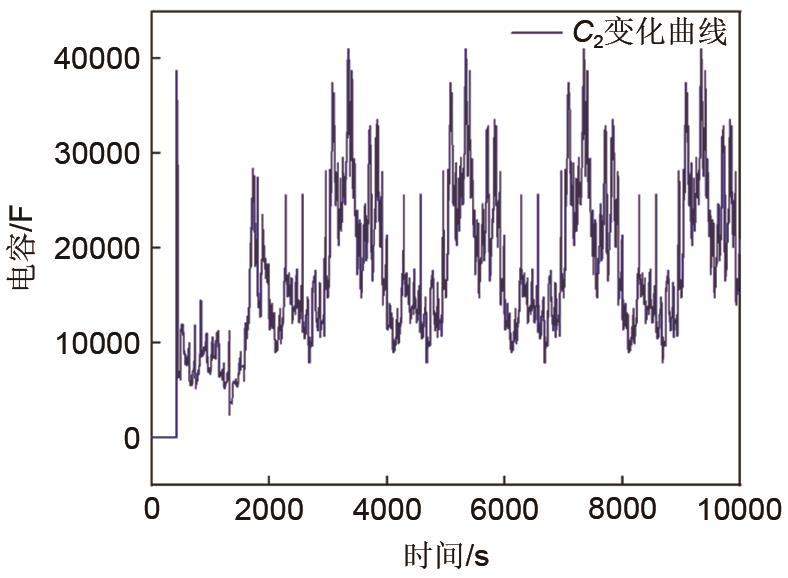
Fig. 12
Terminal voltage comparison curve under FUDS condition"
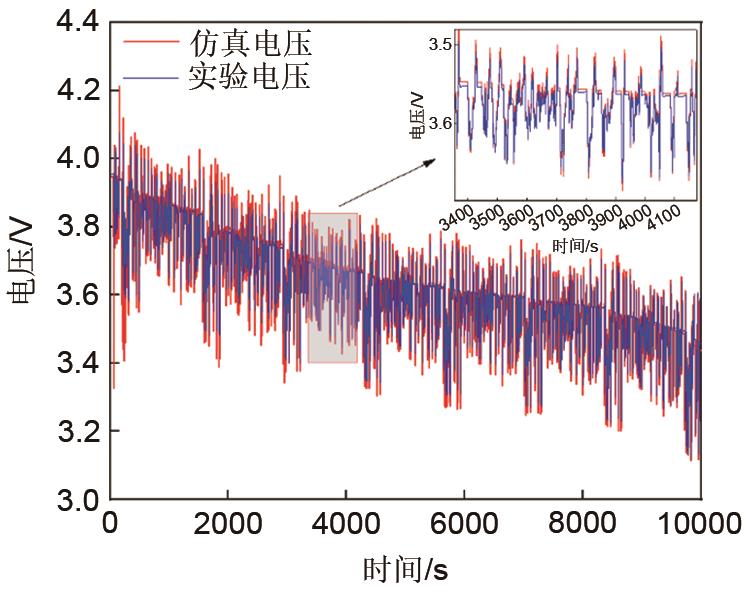
Fig. 13
Terminal voltage error curve under FUDS condition"
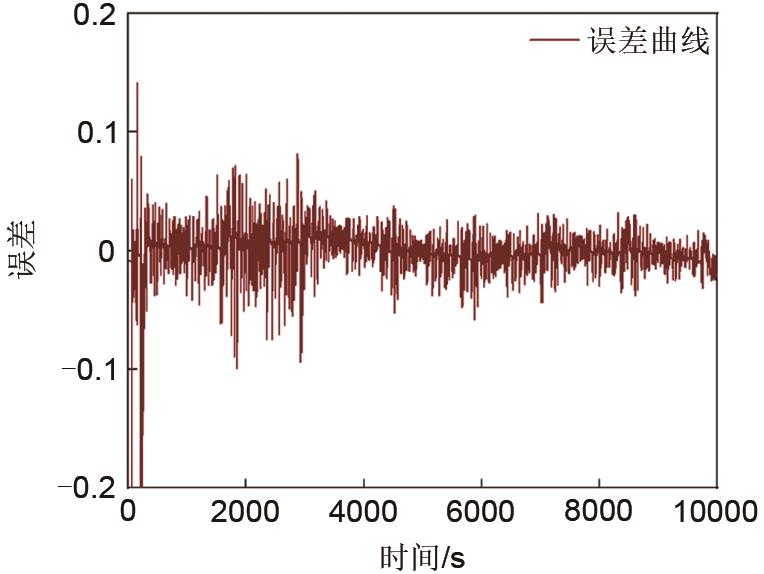
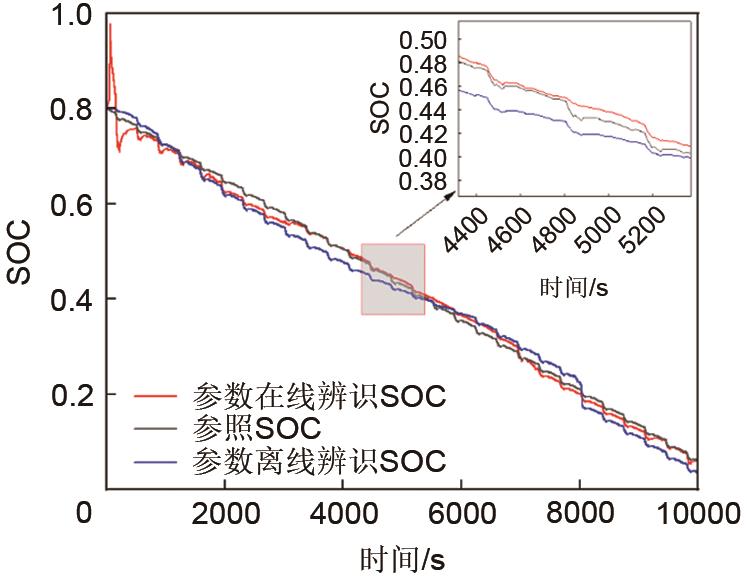
Fig. 14
EKF algorithm to estimate SOC result graph under FUDS"
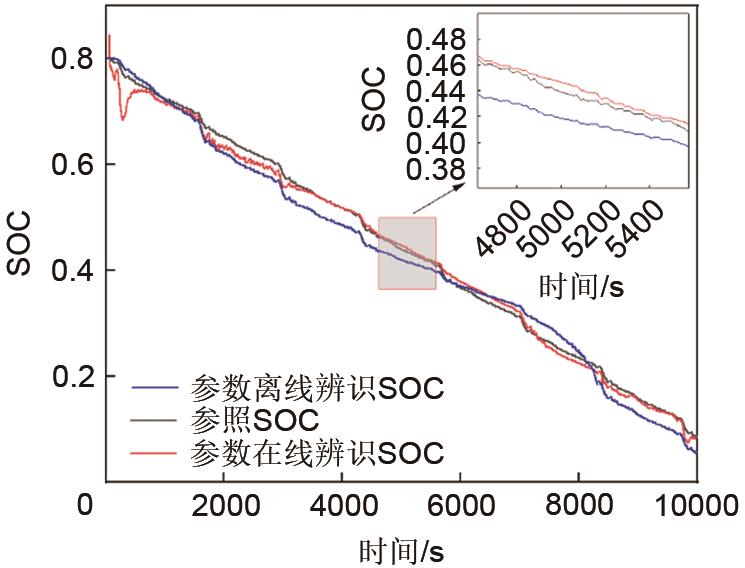
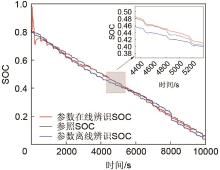
Fig. 15
EKF algorithm to estimate SOC result graph under UDDS"
| 1 | 黎冲, 王成辉, 王高, 等. 锂电池SOC估计的实现方法分析与性能对比综述[J/OL]. 储能科学与技术, 2022, doi: 10.19799/j.cnki.2095-4239.2022.0078. |
| LI C, WANG C H, WANG G, et al. Implementation method analysis and performance comparison of SOC estimation for lithium battery[J/OL]. Energy Storage Science and Technology, 2022, doi: 10.19799/j.cnki.2095-4239.2022.0078. | |
| 2 | 付诗意, 吕桃林, 闵凡奇, 等. 电动汽车用锂离子电池SOC估算方法综述[J]. 储能科学与技术, 2021, 10(3): 1127-1136. |
| FU S Y, LÜ T L, MIN F Q, et al. Review of estimation methods on SOC of lithium-ion batteries in electric vehicles[J]. Energy Storage Science and Technology, 2021, 10(3): 1127-1136. | |
| 3 | 刘雨洋, 王顺利, 谢滟馨, 等. 基于在线参数辨识和改进2RC-PNGV模型的锂离子电池建模与SOC估算研究[J]. 储能科学与技术, 2021, 10(6): 2312-2317. |
| LIU Y Y, WANG S L, XIE Y X, et al. Research on Li-ion battery modeling and SOC estimation based on online parameter identification and improved 2RC-PNGV model[J]. Energy Storage Science and Technology, 2021, 10(6): 2312-2317. | |
| 4 | 马青云, 王顺利, 余鹏, 等. 基于自适应FFRLS和改进CEKF锂电池SOC的估算[J]. 电源技术, 2022, 46(4): 395-399. |
| MA Q Y, WANG S L, YU P, et al. Estimation of lithium battery SOC based on adaptive FFRLS and improved CEKF[J]. Chinese Journal of Power Sources, 2022, 46(4): 395-399. | |
| 5 | ZHANG Z Y, JIANG L, ZHANG L Z, et al. State-of-charge estimation of lithium-ion battery pack by using an adaptive extended Kalman filter for electric vehicles[J]. Journal of Energy Storage, 2021, 37: doi: 10.1016/j.est.2021.102457. |
| 6 | SHRIVASTAVA P, SOON T K, IDRIS M Y I B, et al. Overview of model-based online state-of-charge estimation using Kalman filter family for lithium-ion batteries[J]. Renewable and Sustainable Energy Reviews, 2019, 113: doi: 10.1016/j.rser.2019.06.040. |
| 7 | LI N, ZHANG Y, HE F X, et al. Review of lithium-ion battery state of charge estimation[J]. Global Energy Interconnection, 2021, 4(6): 619-630. |
| 8 | SUN C C, LIN H P, CAI H, et al. Improved parameter identification and state-of-charge estimation for lithium-ion battery with fixed memory recursive least squares and sigma-point Kalman filter[J]. Electrochimica Acta, 2021, 387: doi: 10.1016/j.electacta.2021.138501. |
| 9 | 胡文. 基于温度影响的锂离子电池建模及EKF算法下的荷电状态估算研究[D]. 徐州: 中国矿业大学, 2020.HU W. Study on modeling of lithium-ion battery based on temperature effect and SOC estimation based on EKF algorithm[D]. Xuzhou: China University of Mining and Technology, 2020. |
| 10 | 田茂飞, 安治国, 陈星, 等. 基于在线参数辨识和AEKF的锂电池SOC估计[J]. 储能科学与技术, 2019, 8(4): 745-750. |
| TIAN M F, AN Z G, CHEN X, et al. SOC estimation of lithium battery based online parameter identification and AEKF[J]. Energy Storage Science and Technology, 2019, 8(4): 745-750. | |
| 11 | 高文哲, 黄涛. 基于扩展卡尔曼滤波模型的电动汽车锂电池SOC估算研究[J]. 通信电源技术, 2020, 37(1): 44-45, 47. |
| GAO W Z, HUANG T. SOC estimation of lithium battery in electric vehicle based on extended Kalman filter model[J]. Telecom Power Technology, 2020, 37(1): 44-45, 47. | |
| 12 | 王志福, 刘兆健, 李仁杰. 基于BCRLS-AEKF的锂离子电池荷电状态估计及硬件在环验证[J]. 北京理工大学学报, 2020, 40(3): 275-281. |
| WANG Z F, LIU Z J, LI R J. State of charge estimation and hardware-in-loop verification of lithium-ion battery based on BCRLS-AEKF[J]. Transactions of Beijing Institute of Technology, 2020, 40(3): 275-281. |
| [1] | Linwang DENG, Tianyu FENG, Shiwei SHU, Zifeng ZHANG, Bin GUO. Review of a fast-charging strategy and technology for lithium-ion batteries [J]. Energy Storage Science and Technology, 2022, 11(9): 2879-2890. |
| [2] | Zhizhan LI, Jinlei QIN, Jianing LIANG, Zhengrong LI, Rui WANG, Deli WANG. High-nickel ternary layered cathode materials for lithium-ion batteries: Research progress, challenges and improvement strategies [J]. Energy Storage Science and Technology, 2022, 11(9): 2900-2920. |
| [3] | Xiaoyu CHEN, Mengmeng GENG, Qiankun WANG, Jiani SHEN, Yijun HE, Zifeng MA. Electrochemical impedance feature selection and gaussian process regression based on the state-of-health estimation method for lithium-ion batteries [J]. Energy Storage Science and Technology, 2022, 11(9): 2995-3002. |
| [4] | Yang WANG, Xu LU, Yuxin ZHANG, Long LIU. Thermal runaway exhaust strategy of power battery [J]. Energy Storage Science and Technology, 2022, 11(8): 2480-2487. |
| [5] | Qingsong ZHANG, Yang ZHAO, Tiantian LIU. Effects of state of charge and battery layout on thermal runaway propagation in lithium-ion batteries [J]. Energy Storage Science and Technology, 2022, 11(8): 2519-2525. |
| [6] | Yong MA, Xiaohan LI, Lei SUN, Dongliang GUO, Jinggang YANG, Jianjun LIU, Peng XIAO, Guangjun QIAN. Parameter design of lithium-ion batteries based on a three-dimensional electrochemical thermal coupling lithium precipitation model [J]. Energy Storage Science and Technology, 2022, 11(8): 2600-2611. |
| [7] | Liang TANG, Xiaobo YIN, Houfu WU, Pengjie LIU, Qingsong WANG. Demand for safety standards in the development of the electrochemical energy storage industry [J]. Energy Storage Science and Technology, 2022, 11(8): 2645-2652. |
| [8] | Liping HUO, Weiling LUAN, Zixian ZHUANG. Development trend of lithium-ion battery safety technology for energy storage [J]. Energy Storage Science and Technology, 2022, 11(8): 2671-2680. |
| [9] | Zhicheng CAO, Kaiyun ZHOU, Jiali ZHU, Gaoming LIU, Min YAN, Shun TANG, Yuancheng CAO, Shijie CHENG, Weixin ZHANG. Patent analysis of fire-protection technology of lithium-ion energy storage system [J]. Energy Storage Science and Technology, 2022, 11(8): 2664-2670. |
| [10] | Tao SUN, Tengteng SHEN, Xin LIU, Dongsheng REN, Jinhai LIU, Yuejiu ZHENG, Luyan WANG, Languang LU, Minggao OUYANG. Application of titration gas chromatography technology in the quantitative detection of lithium plating in Li-ion batteries [J]. Energy Storage Science and Technology, 2022, 11(8): 2564-2573. |
| [11] | Yue ZHANG, Depeng KONG, Ping PING. Performance and design optimization of a cold plate for inhibiting thermal runaway propagation of lithium-ion battery packs [J]. Energy Storage Science and Technology, 2022, 11(8): 2432-2441. |
| [12] | Chengshan XU, Borui LU, Mengqi ZHANG, Huaibin WANG, Changyong JIN, Minggao OUYANG, Xuning FENG. Study on thermal runaway gas evolution in the lithium-ion battery energy storage cabin [J]. Energy Storage Science and Technology, 2022, 11(8): 2418-2431. |
| [13] | Wei KONG, Jingtao JIN, Xipo LU, Yang SUN. Study on cooling performance of lithium ion batteries with symmetrical serpentine channel [J]. Energy Storage Science and Technology, 2022, 11(7): 2258-2265. |
| [14] | Yuzuo WANG, Jin WANG, Yinli LU, Dianbo RUAN. Study on the effects of pore structure on lithium-storage performances for soft carbon [J]. Energy Storage Science and Technology, 2022, 11(7): 2023-2029. |
| [15] | Shunmin YI, Linbo XIE, Li PENG. Remaining useful life prediction of lithium-ion batteries based on VF-DW-DFN [J]. Energy Storage Science and Technology, 2022, 11(7): 2305-2315. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
