Energy Storage Science and Technology ›› 2024, Vol. 13 ›› Issue (11): 4065-4077.doi: 10.19799/j.cnki.2095-4239.2024.0546
• Energy Storage Test: Methods and Evaluation • Previous Articles Next Articles
Kangyong YIN1( ), Lei SUN1, Haomiao LI2(), Dongliang GUO1, Peng XIAO1, Kangli WANG2, Kai JIANG2
), Lei SUN1, Haomiao LI2(), Dongliang GUO1, Peng XIAO1, Kangli WANG2, Kai JIANG2
Received:2024-06-17
Revised:2024-07-25
Online:2024-11-28
Published:2024-11-27
Contact:
Haomiao LI
E-mail:yinkangyong@163.com;lihm@hust.edu.cn
CLC Number:
Kangyong YIN, Lei SUN, Haomiao LI, Dongliang GUO, Peng XIAO, Kangli WANG, Kai JIANG. SOC estimation of lithium-ion batteries based on DN-AUKF[J]. Energy Storage Science and Technology, 2024, 13(11): 4065-4077.
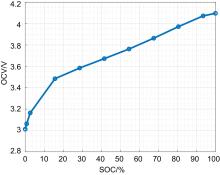
Fig. 1
OCV-SOC curve of lithium-ion batteries"
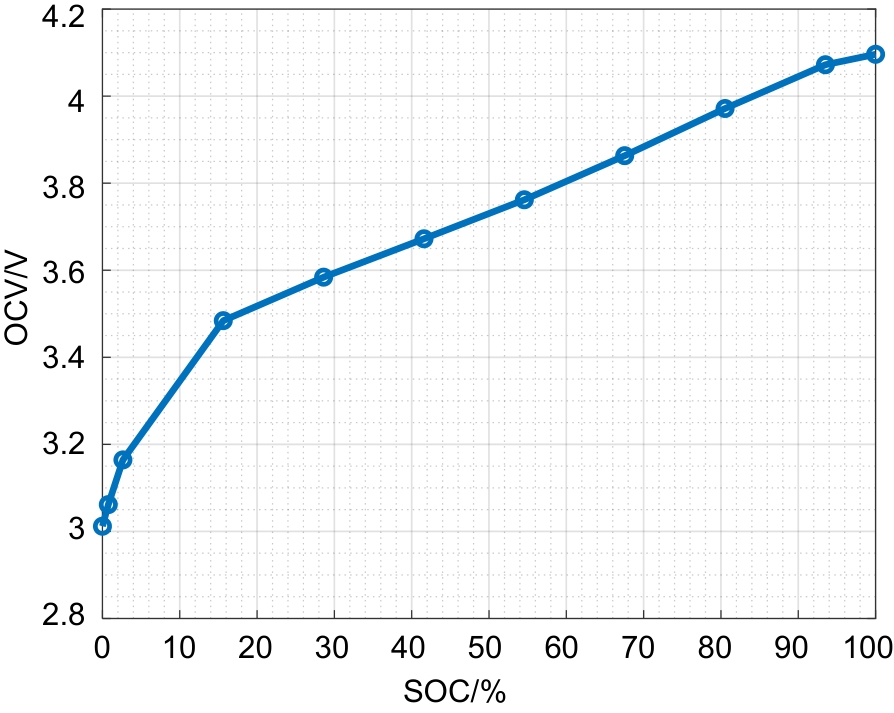
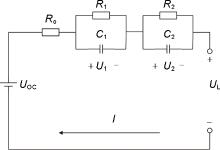
Fig. 2
Equivalent circuit model"
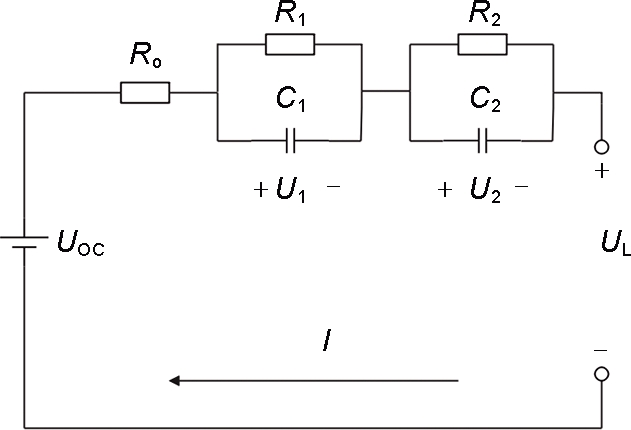

Fig. 3
Current and voltage curve under HPPC test: (a) Current curve; (b) Voltage curve"
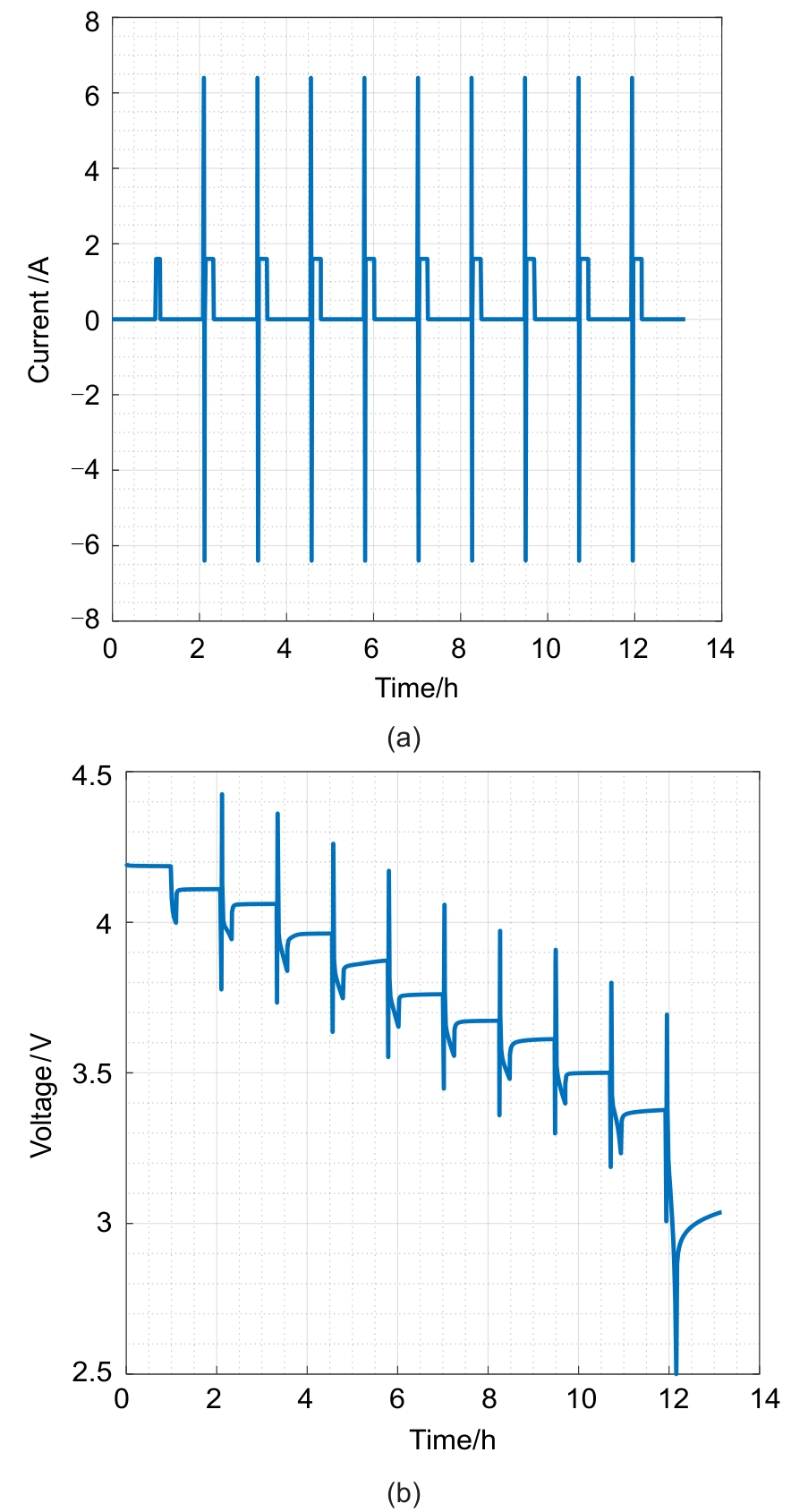

Fig. 4
HPPC test current profile and voltage profile within a single cycle: (a) Current curve; (b) Voltage curve"
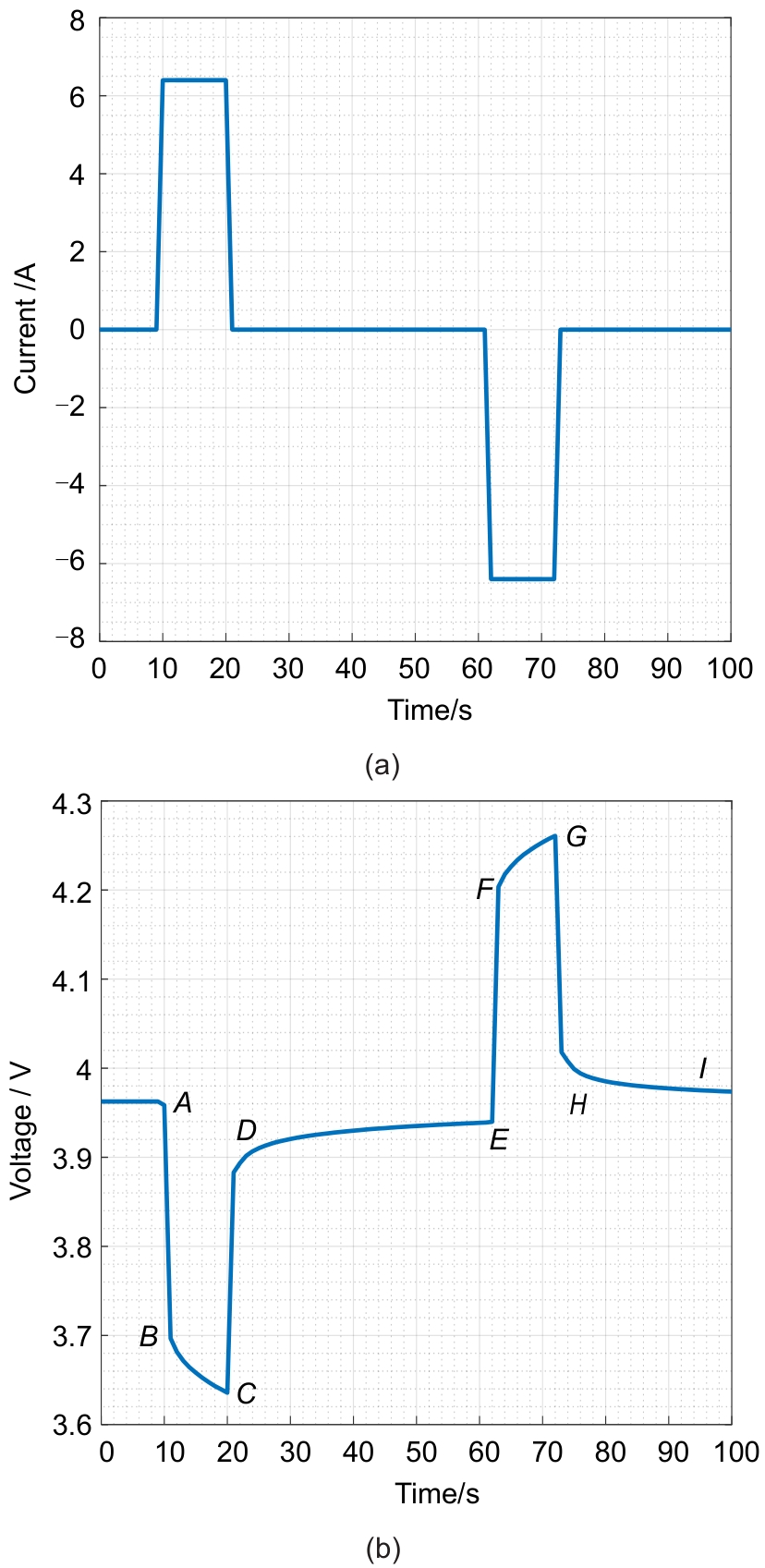
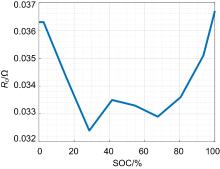
Fig. 5
R0 parameter identification results"


Fig. 6
Parameter identification results for the polarization internal resistance and polarization capacitance: (a) R1; (b) R2; (c) C1; (d) C2"
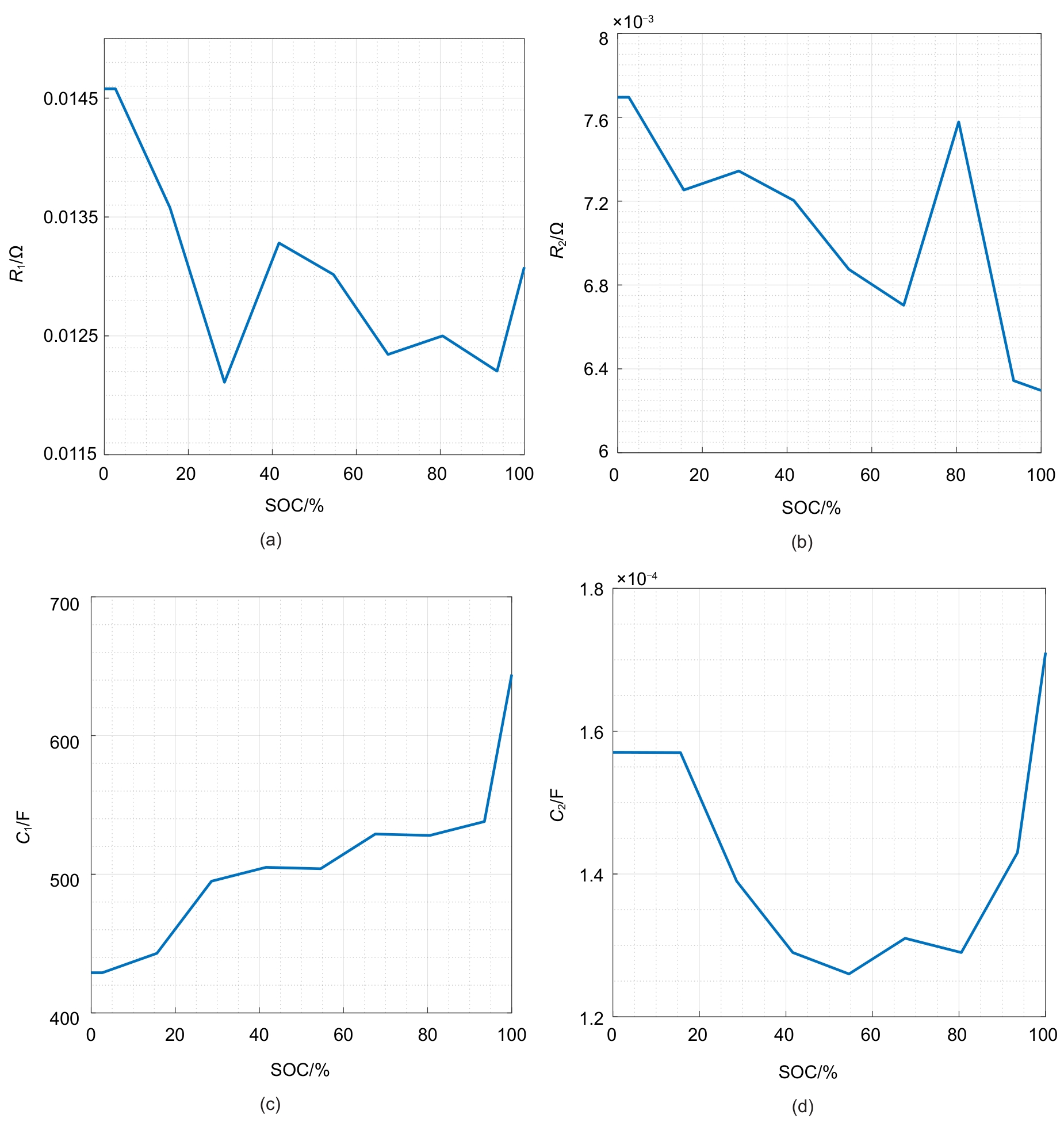
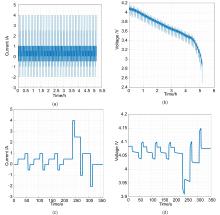
Fig. 7
Current and voltage curve under DST test: (a) Current curve; (b) Voltage curve; (c) Current curve within a single DST cycle; (d) Voltage curve within a single DST cycle"
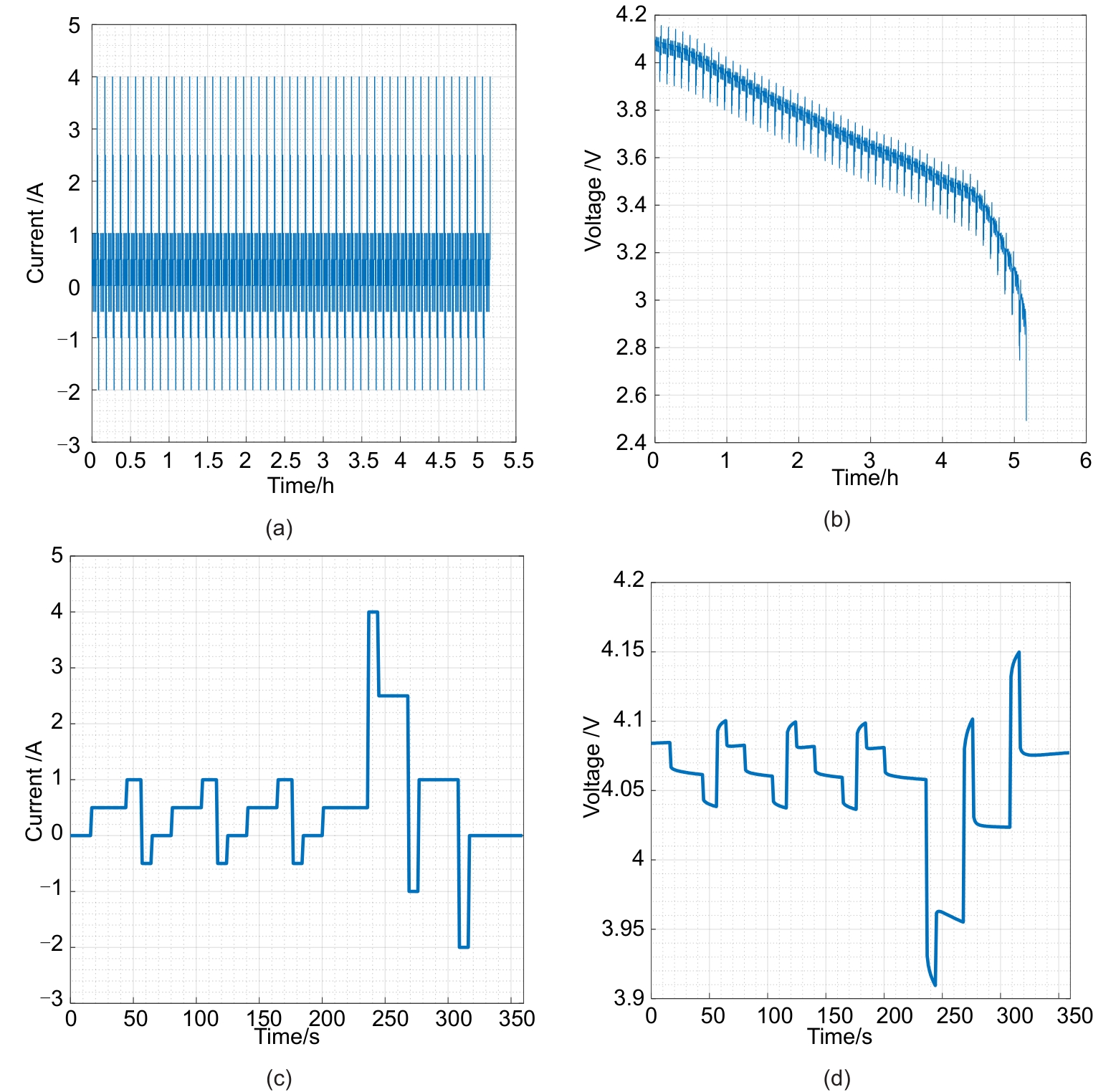

Fig. 8
SOC estimation results under DST : (a) SOC estimation results; (b) SOC estimation error"
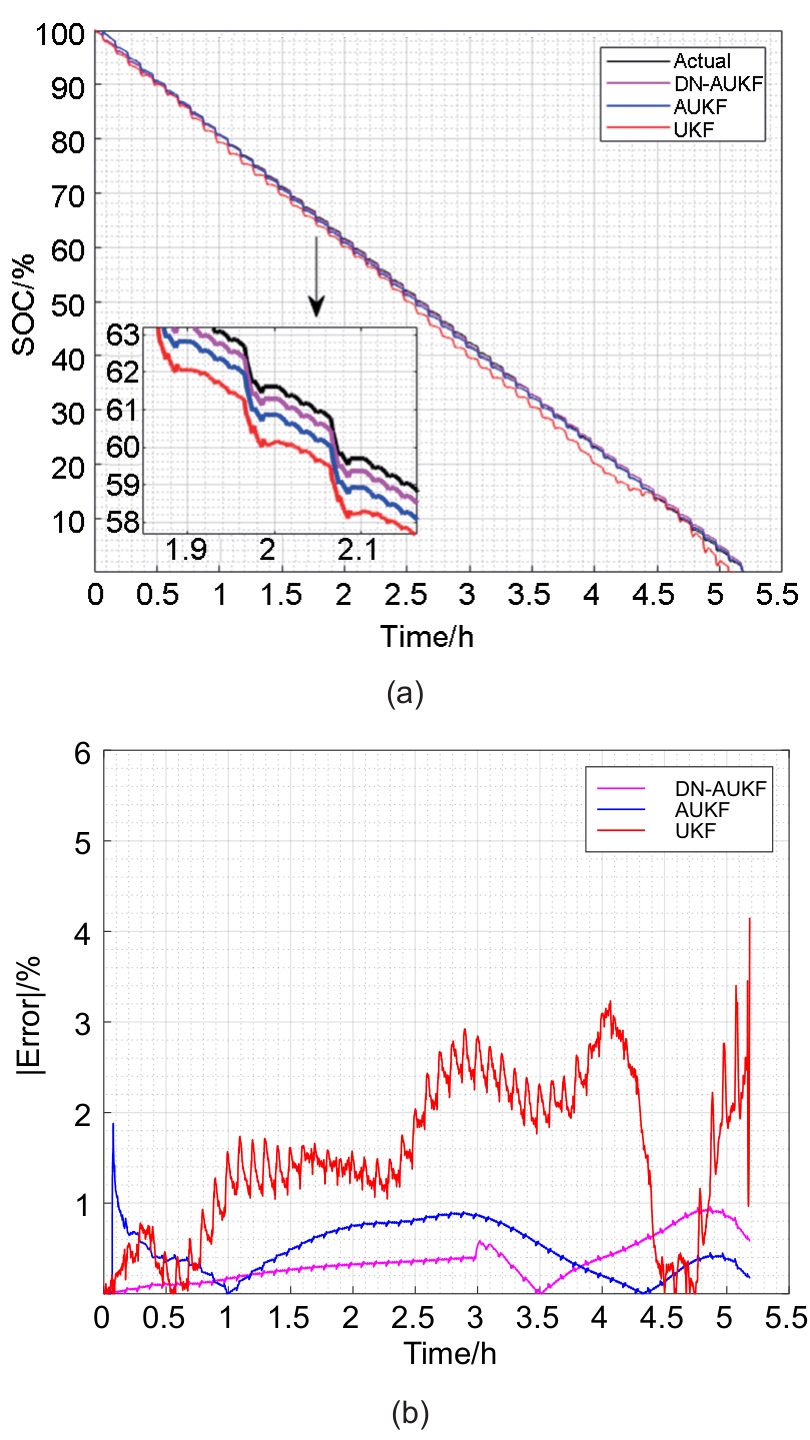
Table 1
Data comparison under DST"
| 算法 | 平均绝对误差 | 最大绝对误差 | 均方根误差 |
|---|---|---|---|
| UKF | 1.52% | 4.15% | 1.74% |
| AUKF | 0.48% | 1.88% | 0.56% |
| DN-AUKF | 0.35% | 0.96% | 0.43% |
Fig. 9
Current and voltage curve under FUDS test: (a) Current curve; (b) Voltage curve; (c) Current curve within a single FUDS cycle; (d) Voltage curve within a single FUDS cycle"
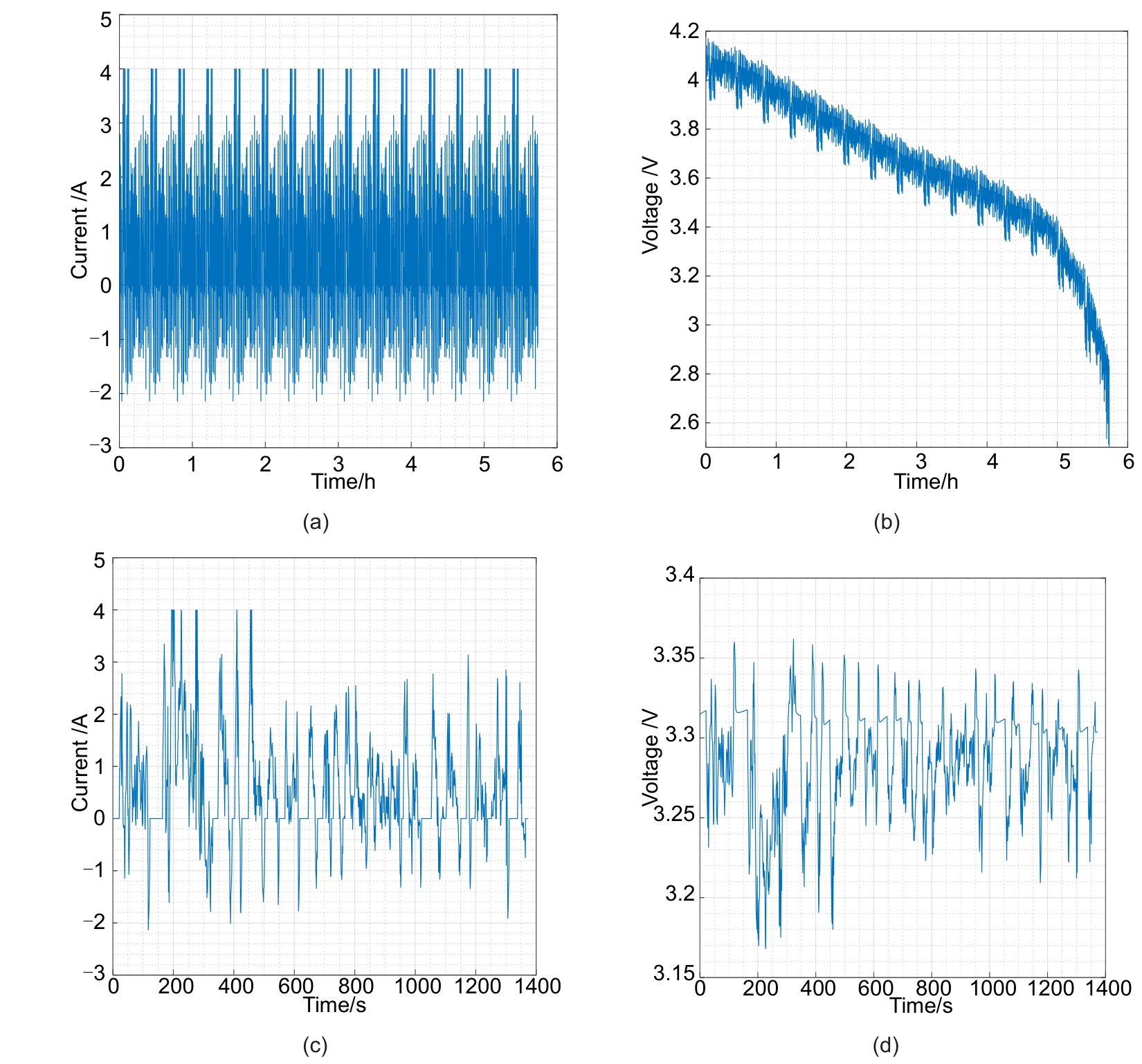
Fig. 10
SOC estimation results under FUDS : (a) SOC estimation results; (b) SOC estimation error"

Table 2
Data comparison under FUDS test"
| 算法 | 平均绝对误差 | 最大绝对误差 | 均方根误差 |
|---|---|---|---|
| UKF | 2.88% | 5.99% | 3.32% |
| AUKF | 1.16% | 1.84% | 1.26% |
| DN-AUKF | 0.59% | 1.28% | 0.71% |

Fig. 11
SOC estimation results under FUDS : (a) SOC estimation results; (b) SOC estimation error"
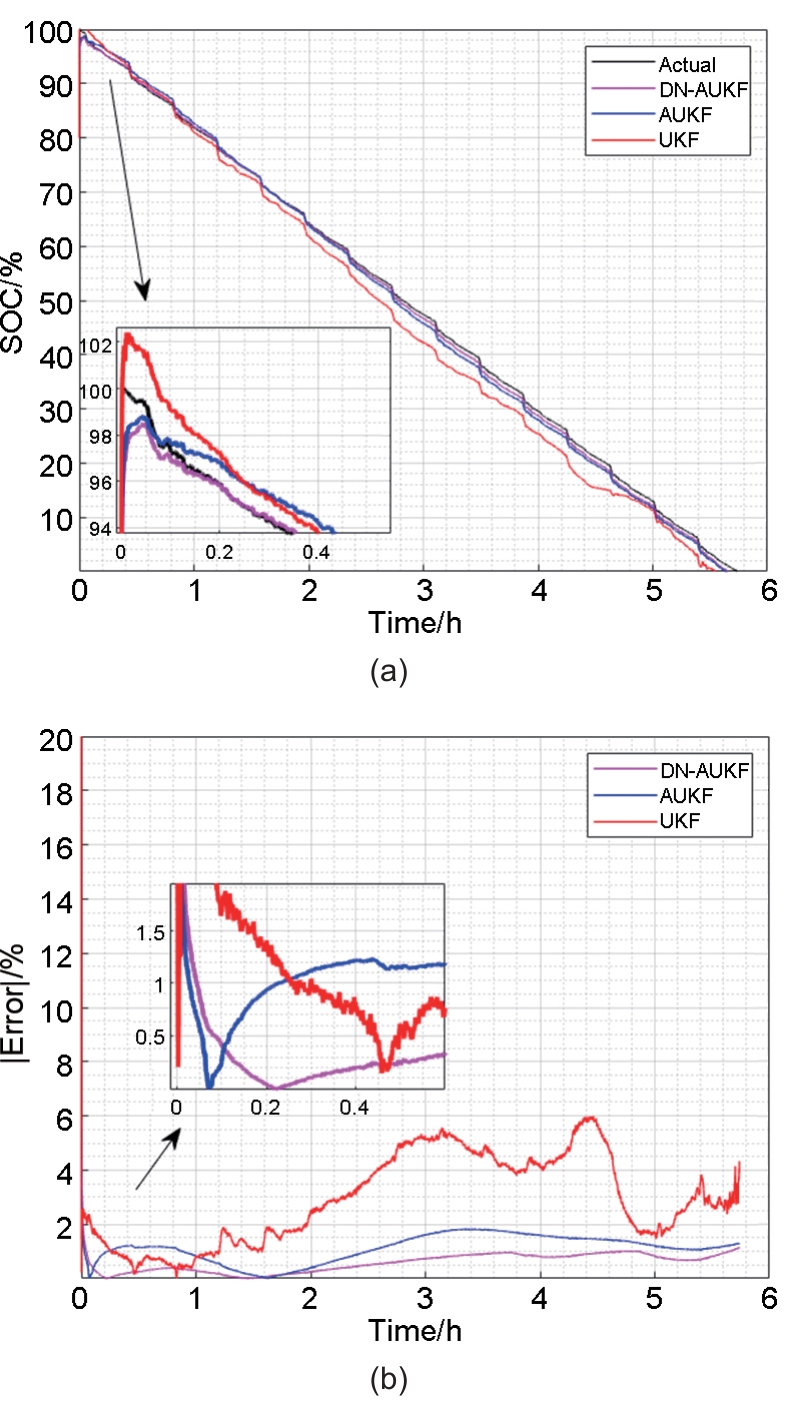
Table 3
Data comparison under FUDS test"
| 算法 | 平均绝对误差 | 最大绝对误差 | 均方根误差 |
|---|---|---|---|
| UKF | 2.91% | 5.99% | 3.33% |
| AUKF | 1.11% | 1.83% | 1.23% |
| DN-AUKF | 0.58% | 1.15% | 0.70% |
Table 4
Comparison of results of SOC estimation methods"
| 算法 | 平均绝对误差 | 均方根误差 | 测试工况 | 参考文献 |
|---|---|---|---|---|
| EKF | 2.17% | 1.86% | 恒流放电 | [ |
| EKF | 3.12% | 3.21% | DST | [ |
| UKF | 1.12% | 0.98% | UDDS | [ |
| CKF | 1.06% | 0.51% | UDDS | [ |
| AEKF | 1.53% | 1.70% | BJDST | [ |
| AEKF | 1.43% | 2.07% | DST | [ |
| AUKF | 1.01% | 1.81% | FUDS | [ |
| DN-AUKF | 0.59% | 0.71% | FUDS | 本工作 |
| 1 | 林正廉, 卢玉斌, 陈亮, 等. 基于TVFRLS和SVD-UKF的锂离子电池SOC估算[J]. 电池, 2023, 53(6): 634-638. DOI: 10.19535/j.1001-1579.2023.06.010. |
| LIN Z L, LU Y B, CHEN L, et al. SOC estimation for Li-ion battery based on TVFRLS and SVD-UKF[J]. Battery Bimonthly, 2023, 53(6): 634-638. DOI: 10.19535/j.1001-1579.2023.06.010. | |
| 2 | 刘国安. 液态金属电池状态估计研究[D]. 武汉: 华中科技大学, 2019. |
| LIU G A. Study on state estimation of liquid metal battery[D]. Wuhan: Huazhong University of Science and Technology, 2019. | |
| 3 | 赵珈卉, 田立亭, 程林. 锂离子电池状态估计与剩余寿命预测方法综述[J]. 发电技术, 2023, 44(1): 1-17. DOI: 10.12096/j.2096-4528.pgt.22082. |
| ZHAO J H, TIAN L T, CHENG L. Review on state estimation and remaining useful life prediction methods for lithium-ion battery[J]. Power Generation Technology, 2023, 44(1): 1-17. DOI: 10.12096/j.2096-4528.pgt.22082. | |
| 4 | 袁翔, 张毅. 电动汽车用动力电池模型研究进展[J]. 公路与汽运, 2014(2): 1-8. DOI: 10.3969/j.issn.1671-2668.2014.02.001. |
| YUAN X, ZHANG Y. Research progress of power battery model for electric vehicle[J]. Highways & Automotive Applications, 2014(2): 1-8. DOI: 10.3969/j.issn.1671-2668.2014.02.001. | |
| 5 | 井冰, 芦朋, 李博. 锂电池容量衰减和循环寿命影响因素浅析[J]. 中国安全防范技术与应用, 2018(3): 62-67. |
| JING B, LU P, LI B. Analysis on factors affecting capacity attenuation and cycle life of lithium battery[J]. China Security Protection Technology and Application, 2018(3): 62-67. | |
| 6 | 程琬晴. 电驱无人机能源系统状态估计及预测建模方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2021. DOI: 10.27061/d.cnki.ghgdu.2021.003255. |
| CHENG W Q. Research on state estimation and predictive modeling method of energy system of electrically driven UAV[D]. Harbin: Harbin Institute of Technology, 2021. DOI: 10.27061/d.cnki.ghgdu.2021.003255. | |
| 7 | 胡言庆, 杨斌, 王宇作, 等. 不同工况下功率型锂离子电池的热特性与仿真研究[J]. 电工电能新技术, 2023, 42(1): 21-28. DOI: 10.12067/ATEEE2204052. |
| HU Y Q, YANG B, WANG Y Z, et al. Thermal characteristics and simulation of power lithium-ion batteries under different operating conditions[J]. Advanced Technology of Electrical Engineering and Energy, 2023, 42(1): 21-28. DOI: 10.12067/ATEEE2204052. | |
| 8 | AHMED R, GAZZARRI J, ONORI S, et al. Model-based parameter identification of healthy and aged Li-ion batteries for electric vehicle applications[J]. SAE International Journal of Alternative Powertrains, 2015, 4(2): 233-247. DOI: 10.4271/2015-01-0252. |
| 9 | 石琴, 蒋正信, 刘翼闻, 等. 基于分数阶模型的锂离子电池荷电状态估计[J]. 机械工程学报, 2024, 60(8): 224-232, 244. |
| SHI Q, JIANG Z X, LIU Y W, et al. Fractional order model-based estimation for state of charge in lithium-ion battery[J]. Journal of Mechanical Engineering, 2024, 60(8): 224-232, 244. | |
| 10 | 李路路, 陶正顺, 潘庭龙, 等. 锂电池分数阶建模及SOC估计策略[J]. 储能科学与技术, 2023, 12(2): 544-551. DOI: 10.19799/j.cnki.2095-4239.2022.0551. |
| LI L L, TAO Z S, PAN T L, et al. Research on fractional modeling and SOC estimation strategy for lithium batteries[J]. Energy Storage Science and Technology, 2023, 12(2): 544-551. DOI: 10.19799/j.cnki.2095-4239.2022.0551. | |
| 11 | 谭必蓉, 杜建华, 叶祥虎, 等. 基于模型的锂离子电池SOC估计方法综述[J]. 储能科学与技术, 2023, 12(6): 1995-2010. DOI: 10.19799/j.cnki.2095-4239.2023.0016. |
| TAN B R, DU J H, YE X H, et al. Overview of SOC estimation methods for lithium-ion batteries based on model[J]. Energy Storage Science and Technology, 2023, 12(6): 1995-2010. DOI: 10.19799/j.cnki.2095-4239.2023.0016. | |
| 12 | CHEN X, SHEN W X, CAO Z, et al. Sliding mode observer for state of charge estimation based on battery equivalent circuit in electric vehicles[J]. Australian Journal of Electrical & Electronics Engineering, 2012, 9(3): DOI: 10.7158/e11-056.2012.9.3. |
| 13 | TIAN Y, XIA B Z, WANG M W, et al. Comparison study on two model-based adaptive algorithms for SOC estimation of lithium-ion batteries in electric vehicles[J]. Energies, 2014, 7(12): 8446-8464. DOI: 10.3390/en7128446. |
| 14 | SUN F C, HU X S, ZOU Y, et al. Adaptive unscented Kalman filtering for state of charge estimation of a lithium-ion battery for electric vehicles[J]. Energy, 2011, 36(5): 3531-3540. DOI: 10.1016/j.energy.2011.03.059. |
| 15 | TIAN Y, LI D, TIAN J D, et al. State of charge estimation of lithium-ion batteries using an optimal adaptive gain nonlinear observer[J]. Electrochimica Acta, 2017, 225: 225-234. DOI: 10.1016/j.electacta.2016.12.119. |
| 16 | PLETT G L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs. Part 3. State and parameter estimation[J]. Journal of Power Sources, 2004, 134(2): 277-292. DOI: 10.1016/j.jpowsour.2004.02.033. |
| 17 | PLETT G L. Sigma-point Kalman filtering for battery management systems of LiPB-based HEV battery packs part 2: Simultaneous state and parameter estimation[J]. Journal of Power Sources, 2006, 161(2): 1369-1384. DOI: 10.1016/j.jpowsour.2006.06.004. |
| 18 | HE W, WILLIARD N, CHEN C C, et al. State of charge estimation for electric vehicle batteries using unscented Kalman filtering[J]. Microelectronics Reliability, 2013, 53(6): 840-847. DOI: 10.1016/j.microrel.2012.11.010. |
| 19 | TIAN Y, XIA B Z, SUN W, et al. A modified model based state of charge estimation of power lithium-ion batteries using unscented Kalman filter[J]. Journal of Power Sources, 2014, 270: 619-626. DOI: 10.1016/j.jpowsour.2014.07.143. |
| 20 | LI J H, KLEE BARILLAS J, GUENTHER C, et al. A comparative study of state of charge estimation algorithms for LiFePO4 batteries used in electric vehicles[J]. Journal of Power Sources, 2013, 230: 244-250. DOI: 10.1016/j.jpowsour.2012.12.057. |
| 21 | HE H W, QIN H Z, SUN X K, et al. Comparison study on the battery SoC estimation with EKF and UKF algorithms[J]. Energies, 2013, 6(10): 5088-5100. DOI: 10.3390/en6105088. |
| 22 | XIONG R, HE H W, SUN F C, et al. Evaluation on state of charge estimation of batteries with adaptive extended Kalman filter by experiment approach[J]. IEEE Transactions on Vehicular Technology, 2013, 62(1): 108-117. DOI: 10.1109/TVT.2012.2222684. |
| 23 | PARTOVIBAKHSH M, LIU G J. An adaptive unscented Kalman filtering approach for online estimation of model parameters and state-of-charge of lithium-ion batteries for autonomous mobile robots[J]. IEEE Transactions on Control Systems Technology, 2015, 23(1): 357-363. DOI: 10.1109/TCST.2014.2317781. |
| 24 | 杜洪刚, 刘广忱, 李阳, 等. 基于DSP和AUKF的锂离子电池SOC估计[J]. 电源技术, 2022, 46(9): 1009-1012. DOI: 10.3969/j.issn.1002-087X.2022.09.015. |
| DU H G, LIU G C, LI Y, et al. SOC estimation of lithium ion batteries based on DSP and adaptive UKF[J]. Chinese Journal of Power Sources, 2022, 46(9): 1009-1012. DOI: 10.3969/j.issn.1002-087X.2022.09.015. | |
| 25 | 卿崇源, 陈少华, 李瑞鹏, 等. 基于FFRLS-DEKF的锂电池SOC-SOH联合估算研究[J]. 信息技术与信息化, 2024(3): 8-12. |
| QING C Y, CHEN S H, LI R P, et al. Research on joint estimation of SOC-SOH of lithium battery based on FFRLS-DEKF[J]. Information Technology and Informatization, 2024(3): 8-12. | |
| 26 | 钱伟, 赵大中, 郭向伟, 等. 锂电池自适应无迹H∞滤波SOC估计研究[J/OL].储能科学与技术,1-11[2024-09-30].https://doi.org/10.19799/j.cnki.2095-4239.2024.0434. |
| QIAN W, ZHAO D Z, GUO X W, WANG Y F, Li W J. State of charge estimation of lithium battery based on Adaptive Unscented H Infinity Filter [J]. Energy Storage Science and Technology, 1-11[2024-09-30].https://doi.org/10.19799/j.cnki. 2095-4239.2024.0434. | |
| 27 | 武龙星, 庞辉, 晋佳敏, 等. 基于电化学模型的锂离子电池荷电状态估计方法综述[J]. 电工技术学报, 2022, 37(7): 1703-1725. DOI: 10.19595/j.cnki.1000-6753.tces.211030. |
| WU L X, PANG H, JIN J M, et al. A review of SOC estimation methods for lithium-ion batteries based on electrochemical model[J]. Transactions of China Electrotechnical Society, 2022, 37(7): 1703-1725. DOI: 10.19595/j.cnki.1000-6753.tces.211030. | |
| 28 | 吴冠文. 基于自适应卡尔曼滤波的锂电池SOC估计[D]. 重庆: 重庆理工大学, 2022. DOI: 10.27753/d.cnki.gcqgx.2022.000292. |
| WU G W. SOC estimation of lithium battery based on adaptive Kalman filter[D]. Chongqing: Chongqing University of Technology, 2022. DOI: 10.27753/d.cnki.gcqgx.2022.000292. | |
| 29 | 杜焕伦, 李哲帆, 石琼林, 等. 基于BP神经网络与DP等效电路的锂离子电池热电耦合模型构建[J/OL].电源学报,1-12[2024-09-30].http://kns.cnki.net/kcms/detail/12.1420.tm.20231219.1348.014.html. |
| DU H L, LI Z F, SHI Q L, et al. Construction of a thermoelectric coupling model for lithium-ion batteries based on BP neural network and DP equivalent circuit [J].Journal of Power Supply, 1-12[2024-09-30].http://kns.cnki.net/kcms/detail/12.1420.tm.20231219.1348.014.html. | |
| 30 | 常小兵, 侯宗尚, 刘连起, 等. 基于电热耦合效应的锂电池荷电状态与温度状态联合估计[J]. 储能科学与技术, 2024, 13(4): 1142-1153. DOI: 10.19799/j.cnki.2095-4239.2023.0889. |
| CHANG X B, HOU Z S, LIU L Q, et al. Joint estimation of the state of charge and temperature of lithium batteries based on the electric thermal coupling effect[J]. Energy Storage Science and Technology, 2024, 13(4): 1142-1153. DOI: 10.19799/j.cnki.2095-4239.2023.0889. | |
| 31 | 何芹. 随机劣化系统可靠性分析与剩余寿命预测方法研究[D]. 长沙: 国防科技大学, 2018. DOI: 10.27052/d.cnki.gzjgu.2018.000137. |
| HE Q. Research on reliability analysis and residual life prediction method of stochastic deterioration system[D]. Changsha: National University of Defense Technology, 2018. DOI: 10.27052/d.cnki.gzjgu.2018.000137. | |
| 32 | 许海深. 导弹导引头天线罩误差斜率补偿研究[D]. 哈尔滨: 哈尔滨工业大学, 2018. |
| XU H S. Research on error slope compensation of missile seeker radome[D]. Harbin: Harbin Institute of Technology, 2018. | |
| 33 | 张海涛, 刘新天. 基于改进自适应无迹卡尔曼滤波算法的锂电池荷电状态估计[J]. 汽车工程师, 2023(11): 12-18. DOI: 10.20104/j.cnki.1674-6546.20230053. |
| ZHANG H T, LIU X T. SOC estimation of lithium battery based on improved AUKF algorithm[J]. Automotive Engineer, 2023(11): 12-18. DOI: 10.20104/j.cnki.1674-6546.20230053. | |
| 34 | 徐裴行. 锂离子动力电池荷电状态与健康状态联合估计算法研究[D]. 南宁: 广西大学, 2022. DOI: 10.27034/d.cnki.ggxiu. 2022.000709. |
| XU P X. Research on joint estimation algorithm of state of charge and health of lithium-ion power battery[D]. Nanning: Guangxi University, 2022. DOI: 10.27034/d.cnki.ggxiu.2022.000709. | |
| 35 | 刘晟, 王建锋, 刘水宙, 潘清云. MSOA算法改进EKF的锂电池SOC估计方法[J/OL].机械科学与技术,1-9[2024-09-30].https://doi.org/10.13433/j.cnki.1003-8728.20240045. |
| LIU S, WANG J F, LIU S Z, PAN Q Y. SOC Estimation of lithium battery using MSOA-optimized EKF [J]. Mechanical Science and Technology, 1-9[2024-09-30].https://doi.org/10.13433/j.cnki.1003-8728.20240045. | |
| 36 | 孙国帅, 王靖岳, 武旭东, 等. 基于改进无迹卡尔曼滤波锂电池SOC估计[J]. 电工技术, 2023(17): 31-36, 43. DOI: 10.19768/j.cnki.dgjs.2023.17.008. |
| SUN G S, WANG J Y, WU X D, et al. SOC estimation of lithium-ion battery based on improved untraced Kalman filtering[J]. Electric Engineering, 2023(17): 31-36, 43. DOI: 10.19768/j.cnki.dgjs.2023.17.008. | |
| 37 | TANG A H, HUANG Y K, LIU S M, et al. A novel lithium-ion battery state of charge estimation method based on the fusion of neural network and equivalent circuit models[J]. Applied Energy, 2023, 348: 121578. DOI: 10.1016/j.apenergy.2023.121578. |
| 38 | 乔家璐, 王顺利, 于春梅, 等. 基于加权多新息AEKF的锂电池SOC在线估算[J]. 储能科学与技术, 2021, 10(6): 2318-2325. DOI: 10.19799/j.cnki.2095-4239.2021.0242. |
| QIAO J L, WANG S L, YU C M, et al. Novel multiple weighted-AEKF method for online state-of-charge estimation of lithium-ion batteries[J]. Energy Storage Science and Technology, 2021, 10(6): 2318-2325. DOI: 10.19799/j.cnki.2095-4239.2021.0242. | |
| 39 | XU C, ZHANG E, JIANG K, et al. Dual fuzzy-based adaptive extended Kalman filter for state of charge estimation of liquid metal battery[J]. Applied Energy, 2022, 327: 120091. DOI: 10.1016/j.apenergy.2022.120091. |
| 40 | 边东生, 杨超. 基于AUKF算法的锂电池SOC估算[J]. 现代机械, 2022(1): 52-56. DOI: 10.13667/j.cnki.52-1046/th.2022.01.012. |
| BIAN D S, YANG C. SOC estimation of lithium battery based on AUKF algorithm[J]. Modern Machinery, 2022(1): 52-56. DOI: 10.13667/j.cnki.52-1046/th.2022.01.012. |
| [1] | Xuefeng HU, Xianlei CHANG, Xiaoxiao LIU, Wei XU, Wenbin ZHANG. SOC estimation of lithium-ion batteries under multiple temperatures conditions based on MIARUKF algorithm [J]. Energy Storage Science and Technology, 2024, 13(9): 2983-2994. |
| [2] | Qingbo LI, Maohui ZHANG, Ying LUO, Taolin LYU, Jingying XIE. Lithium-ion battery state of charge estimation based on equivalent circuit model [J]. Energy Storage Science and Technology, 2024, 13(9): 3072-3083. |
| [3] | Zheng CHEN, Bo YANG, Zhigang ZHAO, Jiangwei SHEN, Renxin XIAO, Xuelei XIA. State of charge estimation considering lithium battery temperature and aging [J]. Energy Storage Science and Technology, 2024, 13(8): 2813-2822. |
| [4] | Mingxian LIU, Jibiao LI, Bingnan TANG, Yi YANG, Renxin XIAO. Online state-of-energy estimation method for lithium-ion batteries used in wearable devices based on adaptive unscented Kalman filter [J]. Energy Storage Science and Technology, 2024, 13(5): 1688-1698. |
| [5] | Gaoqi LIAN, Min YE, Qiao WANG, Yan LI, Yuchuan MA, Yiding SUN, Penghui DU. State-of-charge estimation of lithium-ion batteries in rapid temperature-varying environments based on improved battery model and optimized adaptive cubature Kalman filter [J]. Energy Storage Science and Technology, 2024, 13(5): 1667-1676. |
| [6] | Lin HE, Jiangyan LIU, Bin LIU, Kuining LI, Shuai DAI. Generalized impact of data distribution diversity on SOC prediction of lithium battery [J]. Energy Storage Science and Technology, 2024, 13(5): 1677-1687. |
| [7] | Qing LI, Shaowei ZHANG, Silun LUO, Juchen LI, Haichao CHENG, Chenyi LU. A novel automatic underwater vehicle SOC estimator based on BPNN-AUKF at different temperatures [J]. Energy Storage Science and Technology, 2024, 13(4): 1205-1215. |
| [8] | Aifang ZHANG, Bangda WEI, Zhuohao LI, Yang YANG, Tianqiang YANG, Jun YAO, Jie ZHANG, Fei LIU, Haomiao LI, Kangli WANG, Kai JIANG. Research progress on modeling and SOC online estimation of vanadium redox-flow batteries [J]. Energy Storage Science and Technology, 2024, 13(3): 1036-1049. |
| [9] | Yu ZHANG, Yao YAO, Rui LIU, Lei JIN, Fei XUE, Peng ZHOU, Binyu XIONG. A joint estimation method for SOC/SOP of all vanadium redox batteries based on online parameter identification and ensemble Kalman filtering [J]. Energy Storage Science and Technology, 2024, 13(11): 4089-4101. |
| [10] | Jiangwei SHEN, Canbiao ZHOU, Xing SHU, Zheng CHEN, Yonggang LIU. State of charge estimation for lithium batteries based on an improved electrochemical model at a wide temperature environment [J]. Energy Storage Science and Technology, 2023, 12(9): 2904-2916. |
| [11] | Honghui WANG, Yifan LIU, Deren CHU. Calendar aging of lithium titanate battery with different state of charge [J]. Energy Storage Science and Technology, 2023, 12(8): 2606-2614. |
| [12] | Hongsheng GUAN, Cheng QIAN, Binghui XU, Bo SUN, Yi REN. SAM-GRU-based fusion neural network for SOC estimation in lithium-ion batteries under a wide range of operating conditions [J]. Energy Storage Science and Technology, 2023, 12(7): 2229-2237. |
| [13] | Birong TAN, Jianhua DU, Xianghu YE, Xin CAO, Chang QU. Overview of SOC estimation methods for lithium-ion batteries based on model [J]. Energy Storage Science and Technology, 2023, 12(6): 1995-2010. |
| [14] | Feng LIU, Haizhong CHEN. Lithium-ion battery state prediction based on CEEMDAN and ISOA-ELM [J]. Energy Storage Science and Technology, 2023, 12(4): 1244-1256. |
| [15] | Hongxin WU, Aikui LI, Cun DONG, Shumin SUN, Guanglei LI, Shibo WANG. Control strategy for wind power fluctuation stabilization with energy storage and frequency modulation reserve [J]. Energy Storage Science and Technology, 2023, 12(4): 1194-1203. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
